Blog Posts

Computers finally acting like computers
January 29, 2026

Misplaced Pessimism about AI
August 1, 2024

AI beyond the hype
May 12, 2024

ENZO-TS 2024/Q1 update
May 11, 2024
The irony of LLM hallucinations
September 15, 2023
Computer code, probably instrumental for AGI
July 22, 2023
A definition of reality
July 3, 2022

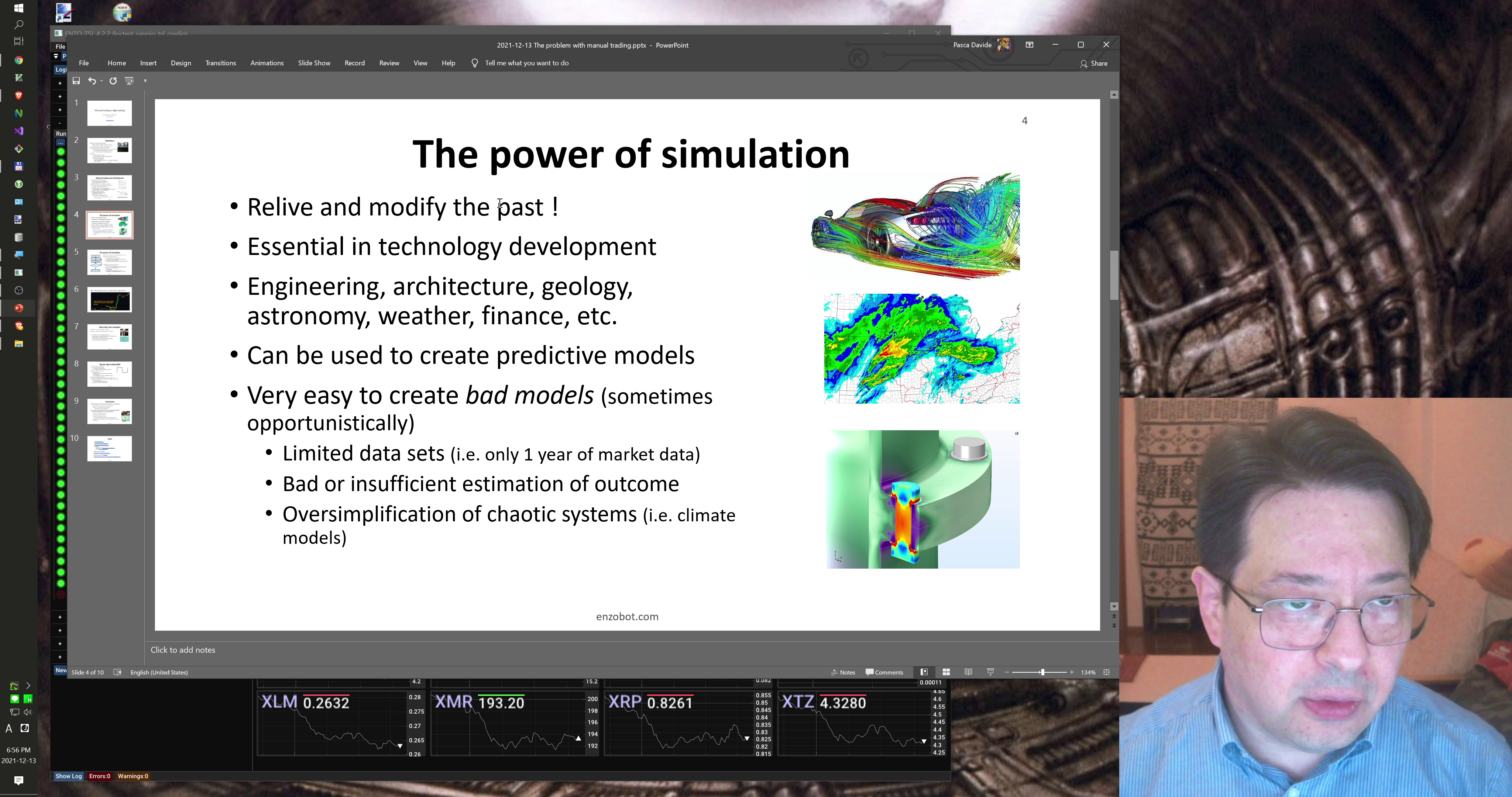
Simulation: from weapon systems to trading
June 8, 2022

Women and children
May 26, 2022

An actual phobia, for a change
April 22, 2022

What's your vote really worth ?
April 7, 2022
DuckDuckGo cheated on me. I'm now dating Presearch
March 31, 2022

On the Moon landing
March 27, 2022
Happily ever after
March 3, 2022

Monkeys with lipstick
January 7, 2022

Next level thinking ?
January 1, 2022
On Deboonkers
December 30, 2021

The explosive "boredom" problem of civilized societies
December 25, 2021
You are probably being simulated, to some degree
December 16, 2021

Kibun Tenkan, VR edition
December 10, 2021
Mass formations and loss of freedom
December 3, 2021
Tokyo-Roma, andata e ritorno (2021/11)
December 1, 2021

The biggest question
October 15, 2021

Shameful death for the non-compliant
October 12, 2021

Adopt a conspiracy theorist
July 18, 2021
Brains to computers, not happening
May 12, 2021
The "rich enough" fallacy
May 6, 2021
Anti-socials
May 4, 2021
Hypnotized emotional beings
May 2, 2021
Teach a dog to wear its muzzle
March 20, 2021
Seek financial independence
February 20, 2021
Truth and reality
January 18, 2021

The take-profit fallacy
January 17, 2021

Digital Perspective
January 13, 2021
My Space !
January 8, 2021
The state of the F-35 sim project
April 11, 2018

From arcade to simulation (gunning for the F-35)
March 31, 2018

Avionics' improvements
November 29, 2017
Better physics for missiles
September 29, 2017

Concept art of enemy base
August 14, 2017
A short video on ground targets
August 14, 2017